






กริปเปอร์ (มือจับ) ที่ใช้สำหรับงานอุตสาหกรรมการผลิต ตอนที่ 3
(Gripper for The general Industrial, Part 3)
วิรัช เดชาสิริสิงห์ ผู้เชี่ยวชาญด้านระบบโรงงานอัตโนมัติและการลดต้นทุนในโรงงานและขบวนการผลิต
[email protected]
ในฉบับที่แล้วได้อธิบายถึงรายละเอียดต่าง ๆ ของกริปเปอร์สุญญากาศ (Vacuum Gripper) หรือในแวดวงการพิมพ์จะเรียกว่า ยางดูดสุญญากาศหรือยางดูดกระดาษ
ซึ่งแบ่งออกได้เป็นประเภทใหญ่ได้ 2 ประเภทคือ ตามลักษณะของรูปร่างของยางดูดสุญญากาศ และตามชนิดของยางที่ใช้ในการผลิตยางดูดสุญญากาศ
สำหรับในฉบับนี้จะเจาะลึกและอธิบายในรายละเอียดของกริปเปอร์อีกชนิดหนึ่งที่นิยมใช้กันมากแทบจะทุกวงการอุตสาหกรรม ซึ่งกริปเปอร์ดังกล่าวคือ กริปเปอร์แบบนิวเมติก (Pneumatic Gripper)
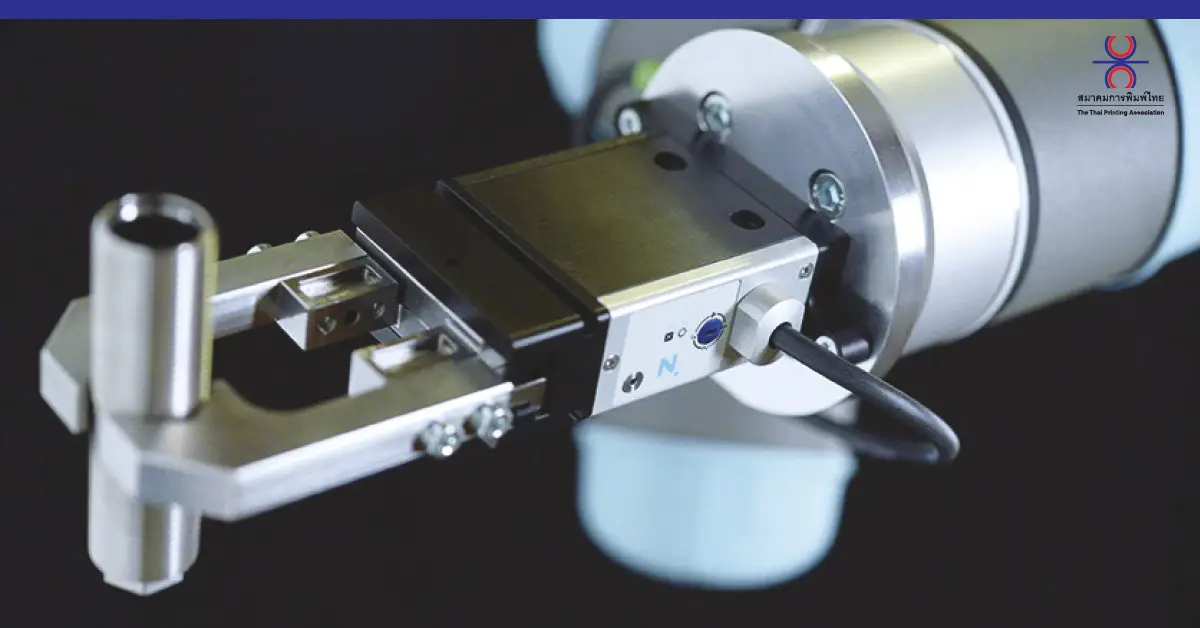
กริปเปอร์แบบใช้ลม (Pneumatic Gripper) หรือรู้จักในชื่อมือจับแบบใช้นิ้ว เป็นกลไกการส่งกำลังที่มีการเชื่อมต่อกับก้านลูกสูบของกระบอกลม หลักการทำงานของกริปเปอร์แบบใช้ลมคือ การใช้ลมอัดเป็นแรงผลักดันให้นิ้วก้ามปูแปลงเป็นเส้นตรงหรือเปิดปิดรอบจุดศูนย์กลาง เพื่อให้เกิดการทำงานตามจังหวะสั่งการของผู้ควบคุม หรือตามโปรแกรมการสั่งการจากระบบควบคุมอัตโนมัติ เป็นต้น
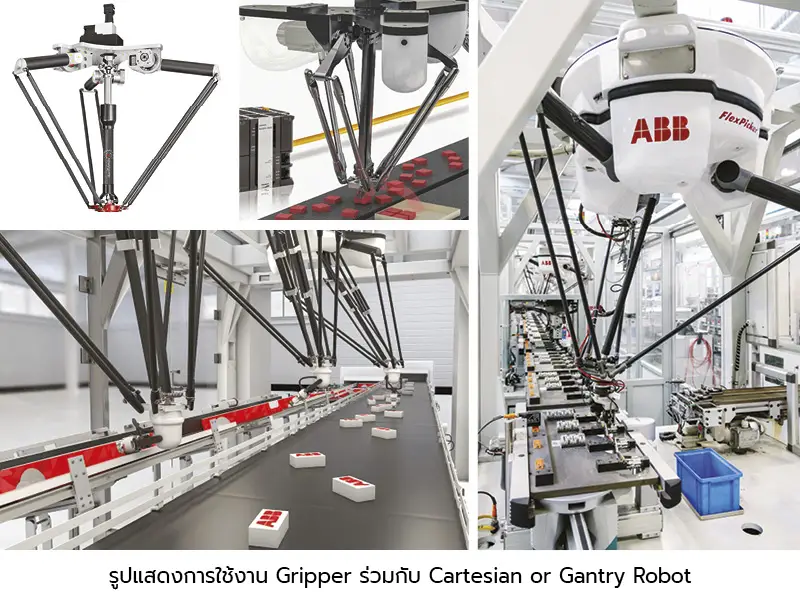
ตามรูปที่แสดงด้านบน เราจะเห็นว่ากริปเปอร์หรือมือจับถูกติดตั้งอยู่ที่แขนของหุ่นยนต์ ซึ่งกริปเปอร์หรือมือจับก็เปรียบเสมือนมือของเราที่มีหน้าที่หยิบจับสิ่งของสำหรับการเคลื่อนย้าย การจัดเรียงหรือการทำงานในลักษณะต่าง ๆ นั่นเอง
ทีนี้เรามาดูการจัดการแบ่งประเภทของกริปเปอร์แบบนี้กัน ซึ่งได้แบ่งออกเป็น 5 ประเภทหลัก ๆ ดังนี้
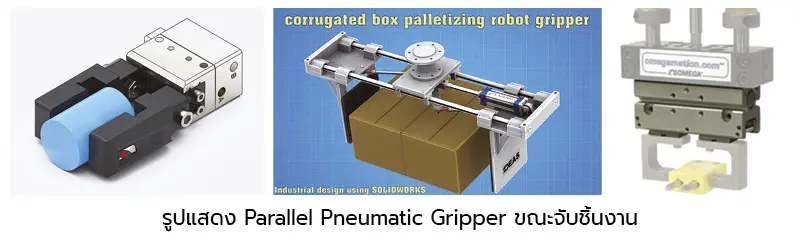
1. Pneumatic Parallel Gripper หรือ กริปเปอร์แบบขนาน
ซึ่งกริปเปอร์แบบขนานนี้ขับเคลื่อนด้วยกระบอกลม มีจุดหมุนหรือข้อเหวี่ยง รางเลื่อน นิ้วหรือมือจับ ซึ่งในขณะทำงานอุปกรณ์และชิ้นส่วนต่าง ๆจะทำงานสอดคล้องกันเพื่อลดการเสียดสีและติดขัดของชิ้นส่วน
สำหรับงานที่นิยมนำกริปเปอร์ลมแบบขนานไปใช้ ได้แก่ กล่องสินค้าที่มีโครงสร้างแข็งแรงและมีรูปร่างสมมาตร เพลาทุกชนิด วัสดุที่มีพื้นผิวค่อนข้างเรียบ เหล่านี้ เป็นต้น
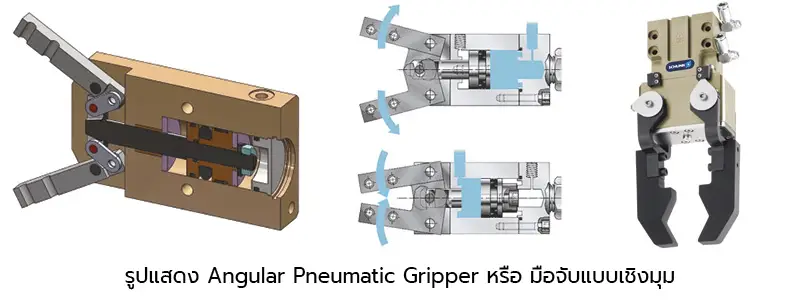
2. Agular Pneumatic Gripper หรือ มือจับแบบเชิงมุม
เป็นกริปเปอร์ที่มีมือหรือนิ้วจับทำมุมเข้า-ออกขณะทำงาน ซึ่งใช้แรงดันลมเป็นตัวต้นกำลังและเปลี่ยนเป็นแรงกล ซึ่งส่วนมากจะเป็นกระบอกลมและมีแขนกล สลักจุดหมุน สปริง และชิ้นส่วนอื่น ๆ มาประกอบร่วมด้วยตามลักษณะของชิ้นงานที่จะนำไปใช้ และส่วนมากเหมาะที่จะหยิบจับชิ้นงานในบริเวณที่มีพื้นที่จำกัดหรือน้อย เนื่องจากกริปเปอร์ลมแบบนี้อาศัยหลักการการทำงานแบบขากรรไกร และยังเหมาะกับชิ้นงานที่มีขนาดใหญ่ น้ำหนักมากและมีรูปร่างไม่สมมาตรได้
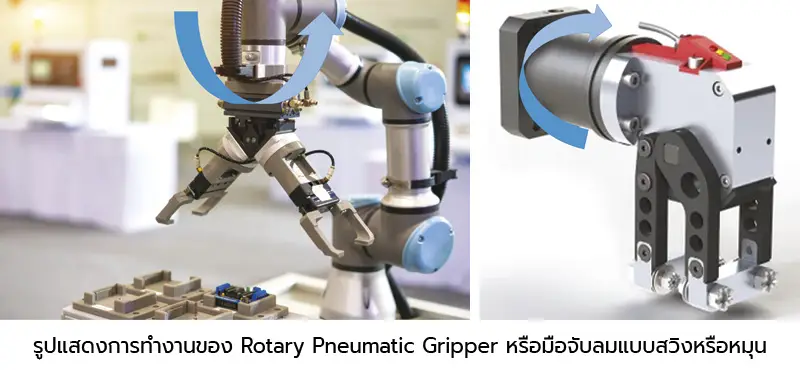
3. Rotary Pneumatic Gripper หรือมือจับลมแบบหมุน
ซึ่งมือจับแบบนี้จะมีชุดกระบอกลมที่หมุนได้ประกอบอยู่และจะทำงานสัมพันธ์กับกระบอก ลมที่ทำหน้าที่ควบคุมการทำงานของนิ้วหรือมือจับ ข้อดีของมือจับแบบนี้ก็คือในการทำงานถ้าชิ้นงานที่อยู่กับที่ มือจับแบบนี้จะหมุนช่วยหาตำแหน่งการจับที่ถูกต้องได้ง่าย และในการปล่อยวางชิ้นงานก็สะดวกในการหมุนหาตำแหน่งเช่นเดียวกัน
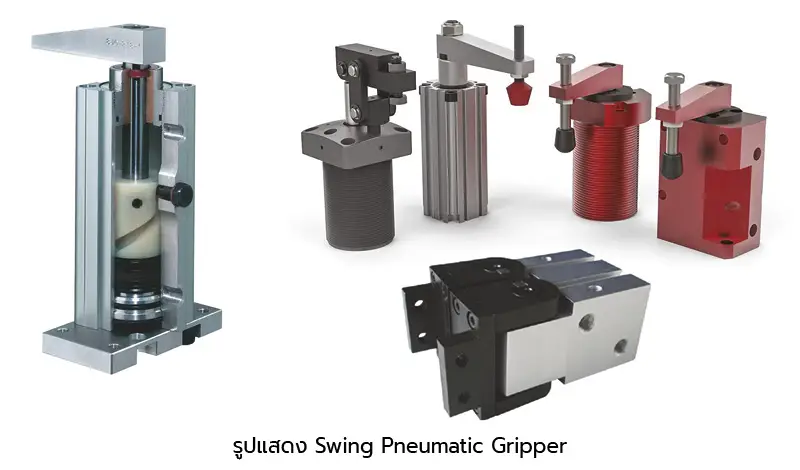
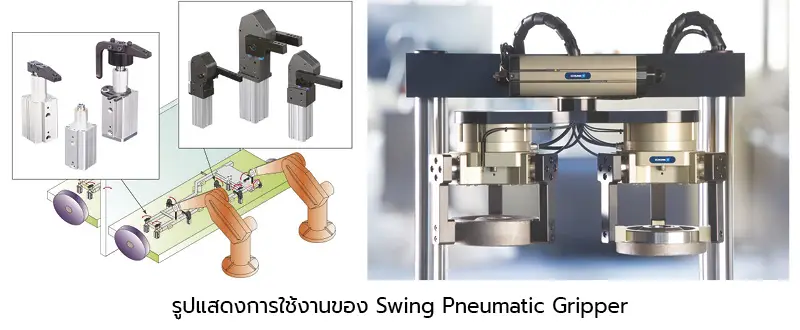
4. Swing Pneumatic Gripper หรือมือจับลมแบบหมุนสวิงหรือแคล้มป์จับแบบสวิง
มือจับแบบนี้ชุดลูกสูบจะทำร่องเลื้อยไว้ เมื่อเกิดการทำงานจะส่งผลให้มีการหมุนของปลายแกนเกิดขึ้น ซึ่งปกติก็ประมาณ 0-180 องศา ซึ่งจะช่วยให้การทำงานมีความรวดเร็วและหลากหลายมากขึ้น
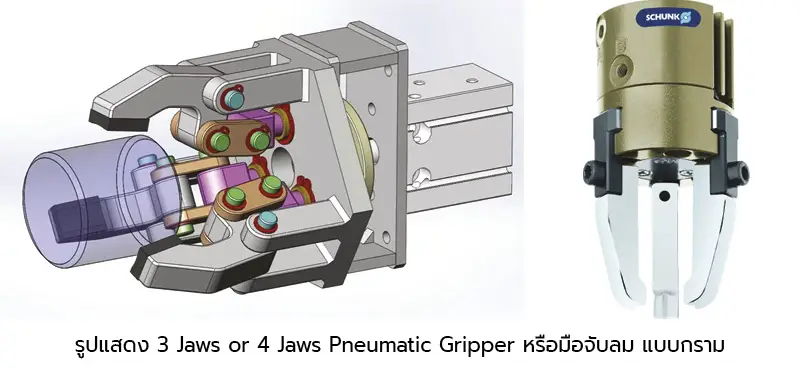
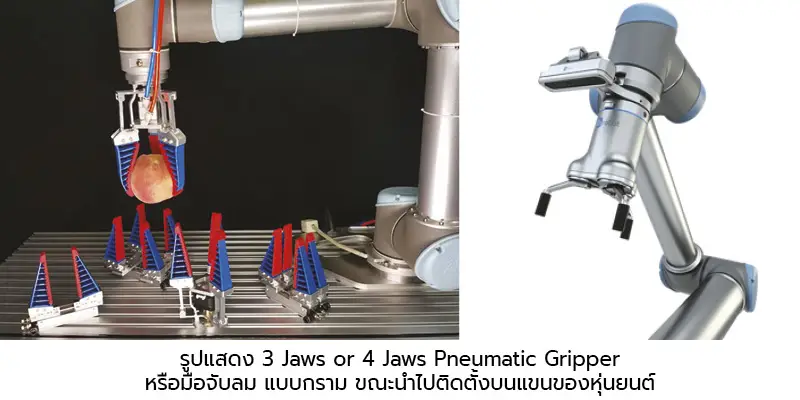
5. 3 Jaws or 4 Jaws Pneumatic Gripper หรือมือจับลม แบบกราม
กริปเปอร์ทรงกระบอกแบบ 3 หรือ 4 ขากรรไกร มีข้อต่อเชื่อมกันระหว่างก้านกระบอกไปยังปลายนิ้วหรือมือจับ ซึ่งเมื่อกระบอกลมทำงาน ขากรรไกรทั้งหมดก็จะเคลื่อนไหวพร้อมกัน และในการทำงานก็จะเกิดความสมดุลย์ในการหยิบจับชิ้นงาน เนื่องจากจำนวนขากรรไกรที่มีมากพอและทำงานพร้อมกัน
การคำนวณหาแรงยึดจับ
แรงจับ
แรงจับ คือ แรงที่ใช้กับชิ้นงานด้วยนิ้วของกริปเปอร์แรงนี้อาจแปรผันขึ้นอยู่กับความดันอากาศ ค่าสัมประสิทธิ์การเสียดสี และสภาวะการจับยึดระหว่างนิ้วกับชิ้นงานเมื่อชิ้นงานไม่ตกระหว่างการยึดจับ แรงยึดจับสําาหรับตัวจับแบบเสียดทานจะคํานวณได้ดังนี้:

• F = แรงจับของนิ้วเดียว (N)
• m= มวลของชิ้นงาน (กก.)
• g = ความเร่งโน้มถ่วง (9.81 ม./วินาที2;)
• a = อัตราเร่งจากการเคลื่อนที่แบบไดนามิก (m/s2)
• n = จํานวนนิ้ว (n=2 สําหรับกริปเปอร์สองนิ้ว n=3 สําหรับกริปเปอร์สามนิ้ว)
• J = ค่าสัมประสิทธิ์แรงเสียดทาน
• S = ปัจจัยด้านความปลอดภัย
ตารางค่าสัมประสิทธิ์แรงเสียดทาน
ค่าสัมประสิทธิ์แรงเสียดทาน
ตารางต่อไปนี้แสดงค่าสัมประสิทธิ์แรงเสียดทานสําหรับวัสดุที่ใช้กันทั่วไปข้อมูลทางทฤษฎีมีไว้เพื่อการอ้างอิงเท่านั้นและอ้างอิงจากการใช้งานจริง
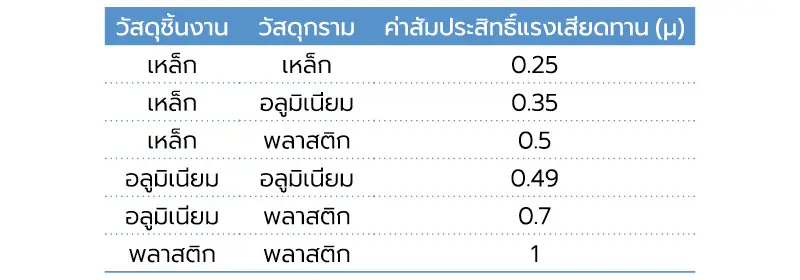
นอกจากนี้ปัจจัยด้านความปลอดภัยยังเป็นข้อพิจารณาอีกด้วยข้อมูลข้างต้นเป็นข้อมูลเชิงทฤษฎี และขนาดปากจับที่ใช้จริงและการใช้งานอาจแตกต่างกันไป
สำหรับการพิจารณาในการเลือกใช้อุปกรณ์มือจับหรือกริปเปอร์แบบใช้ลมนี้ สำหรับใช้ในการขนถ่ายวัสดุ ในการแปรรูปอาหารและเครื่องดื่ม อุปกรณ์บรรจุภัณฑ์ ซึ่งการทำงานที่ต้องการความสะอาดเป็นสิ่งที่จำเป็นเพื่อให้ได้มาตรฐานตามข้อกำหนดของลูกค้าหรือมาตรฐานสากล ซึ่งในการเลือกมือจับแบบใดมาใช้งานนั้นก็ต้องดูความถูกต้อง ความเหมาะสมว่าสอดคล้องกับชิ้นงานหรือไม่ ซึ่งมีข้อมูลให้พิจารณาดังนี้
ขนาดและแรงจับ: กริปเปอร์นิวเมติกควรมีขนาดกว้างเพียงพอที่จะรองรับวัตถุที่กำลังจะจับ แรงกดของนิ้วก็ต้องสัมพันธ์กับน้ำหนักของวัตถุ เช่นเดียวกันกับค่าสัมประสิทธิ์แรงเสียดทานระหว่างนิ้วกับวัตถุ พื้นที่สัมผัสระหว่างนิ้วกับวัตถุ และแรงต้านที่กระทำต่อนิ้วจับ วัสดุและการเคลือบผิวอย่างดีของนิ้วก็มีส่วนช่วยให้การทำงานและเพิ่มค่าสัมประสิทธิ์แรงเสียดทาน และสำหรับมือและนิ้วจับ ถ้าจะใช้ในประเภทของอาหารและยา วัสดุที่ใช้ทำและสารเคลือบป้องกันก็ต้องผ่านมาตรฐาน อย., FDA, GMP, GHP, HACCP เหล่านี้เป็นต้น
รูปร่างของชิ้นส่วน: วัตถุที่จะใช้จับที่มีรูปร่างที่ซับซ้อน ส่วนมากจะใช้มือจับที่เป็น 3 หรือ 4 นิ้ว มากกว่าที่จะใช้มือจับที่มี 2 นิ้ว โดยเฉพาะอย่างยิ่งรูปร่างของชิ้นงานที่มีขนาดแตกต่างกันเล็กน้อย แต่ในกรณีที่ชิ้นงานที่มีความสม่ำเสมอ ก็ควรทดลองใช้มือจับที่เป็นขนาด 2 นิ้วก็พอ เพื่อเป็นการประหยัดต้นทุน เพราะทั้งสองแบบมีราคาที่แตกต่างกัน
สภาพแวดล้อมในการทำงาน: ชิ้นส่วนภายในชุดมือจับ เช่น กระบอกลม ตลับลูกปืน ชิ้นส่วนกลไกทั้งหมด ต้องสามารถทนทานต่อการทำงานจริง ในพื้นที่จริงได้ดี ทั้งในเรื่องของฝุ่นละออง น้ำและความชื้น อุณหภูมิต่ำและสูง สารเคมี เหล่านี้ เป็นต้น ซึ่งมาตรฐานที่ใช้อ้างอิงคือ IP Code, IP Rating, IP Standard ซึ่งย่อมาจาก International Protection Satandard.
ตัวอย่างมาตรฐาน IP
เราอาจเจอมาตรฐาน IP อยู่บ่อย ๆ จากตารางตัวเลขทั้งหมดที่กล่าวมานั้น มีไม่กี่ตัวที่ถูกนํามาใช้และเป็นที่นิยมทํามาจําหน่าย ซึ่งมาตรฐาน IP ที่นิยมและเห็นได้บ่อยครั้งมีดังนี้
IP54 คือ มาตรฐานที่จะเป็นตัวบอกว่าอุปกรณ์หรือเครื่องมือนั้น ๆ มีความสามารถที่จะป้องกันฝุ่นได้แต่อาจมีฝุ่นเล็กน้อยเล็ดลอดเข้าไป โดยฝุ่นที่เล็ดลอดเข้าไปนั้นต้องไม่มีผลใด ๆ ต่อการทํางานของอุปกรณ์และมีความสามารถที่จะป้องกันละอองน้ําที่ตกกระทบตัวอุปกรณ์ได้จากทุกทิศทาง
IP65 คือ มาตรฐานที่จะเป็นตัวบอกว่าอุปกรณ์หรือเครื่องมือนั้น ๆ มีความสามารถที่จะป้องกันฝุ่นได้สมบูรณ์ และมีความสามารถที่จะป้องกันน้ําจากการฉีดที่ตัวอุปกรณ์ได้จากทุกทิศทาง
IP66 คือ มาตรฐานที่จะเป็นตัวบอกว่าอุปกรณ์หรือเครื่องมือนั้น ๆ มีความสามารถที่จะป้องกันฝุ่นได้สมบูรณ์ และมีความสามารถที่จะป้องกันน้ําจากการฉีดแบบรุนแรงที่ตัวอุปกรณ์ได้จากทุกทิศทาง
IP66K คือ มาตรฐานที่จะเป็นตัวบอกว่าอุปกรณ์หรือเครื่องมือนั้น ๆ มีความสามารถที่จะป้องกันฝุ่นได้สมบูรณ์ และมีความสามารถที่จะป้องกันน้ําจากการฉีดแรงดันสูงที่ตัวอุปกรณ์ได้จากทุกทิศทาง
IP67 คือ มาตรฐานที่จะเป็นตัวบอกว่าอุปกรณ์หรือเครื่องมือนั้น ๆ มีความสามารถที่จะป้องกันฝุ่นได้สมบูรณ์ และมีความสามารถที่จะป้องกันการแทรกซึมของน้ําจากการแช่ตัวอุปกรณ์ในน้ําได้ที่ความลึกสูงสุด 1 m เป็นระยะเวลาสูงสุด 30 นาที
IP68 คือ มาตรฐานที่จะเป็นตัวบอกว่าอุปกรณ์หรือเครื่องมือนั้น ๆ มีความสามารถที่จะป้องกันฝุ่นได้สมบูรณ์ และมีความสามารถที่จะป้องกันการแทรกซึมของน้ําจากการแช่ตัวอุปกรณ์ในน้ําได้แบบถาวร
IP69K คือ มาตรฐานที่จะเป็นตัวบอกว่าอุปกรณ์หรือเครื่องมือนั้น ๆ มีความสามารถที่จะป้องกันฝุ่นได้สมบูรณ์ และมีความสามารถที่จะป้องกันน้ําจากการฉีดแรงดันสูงพิเศษที่ตัวอุปกรณ์ได้จากทุกทิศทาง ที่อุณหภูมิน้ําสูงสุด 80 °C
สรุป: ทั้งขนาดและแรงยึดจับ รูปร่างของชิ้นงาน สภาพแวดล้อมในการทำงานและข้อกำหนดอื่น ๆเกี่ยวกับความปลอดภัยต่าง ๆ สำหรับผู้ประกอบการเอง หรือผู้ใช้งานเองอาจมีความรู้ ความเข้าใจในเรื่องนี้ไม่มากพอ ก็ต้องให้ซัพพลายเออร์หลาย ๆ บริษัท นำอุปกรณ์มือจับมาทดลอง ทดสอบในงานจริงถึงจะทราบผลที่ได้ว่าสมควรเลือกใช้งานแบบใด
สำหรับกริปเปอร์ที่กล่าวมาตั้งแต่ต้น ส่วนมากกว่า 80 เปอร์เซนต์จะถูกติดตั้งอยู่ที่ปลายแขนหุ่นยนต์ อีกประมาณ 20 เปอร์เซนต์จะถูกใช้งานและติดตั้งในเครื่องจักรอัตโนมัติและอื่น ๆ
สรุป การใช้งานกริปเปอร์ในระบบอัตโนมัติและหุ่นยนต์ ทางผู้ใช้งานสามารถเลือกใช้ได้อย่างหลากหลาย เพื่อให้เหมาะสมกับงานที่ทำอยู่ และในปัจจุบันก็มีซัพพลายเออร์ไว้บริการมากมาย ซึ่งราคาก็ถูกลงมามากเนื่องจากมีใช้งานอย่างแพร่หลาย รวมถึงความรู้ของผู้ใช้งานเองก็มีมากขึ้น ซึ่งในสถานการณ์ปัจจุบันทางผู้ประกอบการ เจ้าของกิจการก็มีความตื่นตัวในการใช้ระบบอัตโนมัติและหุ่นยนต์เพิ่มมากขึ้น ซึ่งสิ่งที่ตามมาในการใช้ควบคู่กันก็คือ กริปเปอร์นั่นเอง
อ่านต่อฉบับหน้า……..